STEP/DIR контроллер униполярного шагового двигателя на базе PIC16F628
21 июня 2008. Разместил: administrator
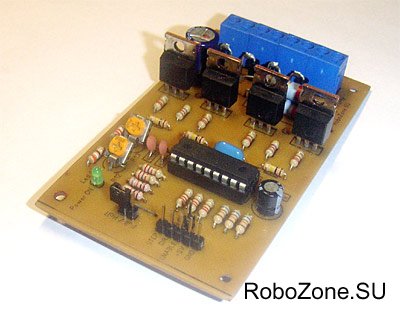
Представляем краткое описание, схему и печатную плату контроллера униполярного шагового двигателя на основе микроконтроллера PIC16F628. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. Схема и прошивка данного контроллера была любезно предоставлена Регнер Сергеем, представителем фирмы «Бинар» (г. Камышин). Печатная плата контроллера была разработана нами.
Особенности контроллера униполярного двигателя PIC BINAR CNC 1.5:
-
ШИМ регулировка ограничения тока фаз
-
ШИМ регулировка ограничения тока фаз в режиме удержания
-
Большой диапазон тока фаз (зависит от силовой части контроллера)
-
Использование универсальных управляющих сигналов STEP, DIR, ENABLE.
-
Работа в режимах «полный шаг», «полушаг» (FULL STEP/ HALF STEP)
-
Рекомендуемое максимальное рабочее напряжение двигателя до 35В
Ограничение тока фаз осуществляется с помощью подстроечного резистора R12.
Регулировка ограничения тока в режиме удержания осуществляется подстроечным резистором R13 и настраивается относительно рабочего тока. Программа контроллера переходит в режим «удержание» автоматически при отсутствии сигнала STEP – это снижает потребление энергии и уменьшает нагрев двигателя.
Сигнал ENABLE управляется низким логическим уровнем –по умолчанию контроллер включен постоянно и использование данного сигнала не обязательно.
Режимы работы «шаг» и «полушаг» переключаются перемычкой, при изменении режимов работы необходим перезапуск контроллера.
Силовые MOSFET транзисторы могут быть выбраны под конкретные требования с подходящей цоколевкой (если устанавливаются более мощные транзисторы и планируется использование двигателей с большим током фаз, необходима установка более мощных резисторов R24, R25) В текущем варианте использованы распространенные транзисторы IRF540. Рекомендуются к использованию IRLZ44N.
Резисторы R24 и R25 имеют максимальную мощность 3W.
Данная информация поставляется «как есть» - претензии не принимаются ;)
Схема контроллера в формате sPlan 6.0, разводка печатной платы под ЛУТ в формате Sprint-Layout 4.0 и файл прошивки в формате *.hex вы можете скачать ниже.
Тема закрыта для комментариев
По всем вопросам обращаться через службу личных сообщений
Вернуться назад