Микрошаговый контроллер шагового двигателя на базе PIC18F2320 V4.0
2 декабря 2008. Разместил: Sergey_r
Контроллер униполярного шагового двигателя на основе микроконтроллера PIC18F2320. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. В контроллере реализован микрошаговый режим и режим удержания с понижением тока фаз.
Особенности контроллера униполярного двигателя PIC BINAR CNC 4.0:
- Аппаратная ШИМ регулировка ограничения тока фаз
- Режим удержания при отсутствии сигнала STEP более 2-х секунд (при указанных номиналах ~ 30% от номинала)
- Больший диапазон напряжения и тока фаз (зависит от силовой части контроллера)
- Использование универсальных управляющих сигналов STEP, DIR, ENABLE.
- Работа в режимах «полный шаг», «полушаг» и «микрошаг» (FULL STEP/ HALF STEP/MICRO STEP)
- Рекомендуемое максимальное рабочее напряжение силовой части до 90В

Регулировка тока фаз осуществляется с помощью подстроечных резисторов R2 и R4.
Перемычками Jmp1-Jmp3 на плате переключаются режимы работы «шаг», «полушаг» и «микрошаг», при изменении режимов работы необходим перезапуск контроллера.
Режимы работы Jmp1 Jmp2 Jmp3
1 on on on
1/2 off on on
1/4 on off on
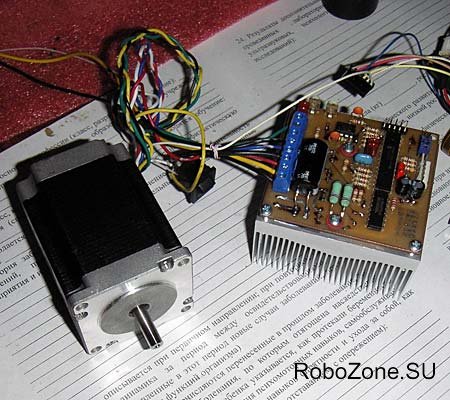
Контроллер тестировался с униполярным шаговым двигателем PL57H76-3.0-6 (1 Ом, 3 А), нагрев двигателя был в пределах рабочего режима, нагрев контроллера минимальный (подаваемое напряжение 24 В, ток 1.2 А), но радиатор для силовой части крайне рекомендуется (габариты зависят от мощности двигателя, в нашем случае он раза в три больше требуемого, просто такой был под рукой...). Тестировался контроллер от генератора импульсов и под управлением программы K-cam. Максимальная частота следования сигнала STEP в режиме шаг и полушаг - 100 кГц, в режиме микрошаг - 50 кГц. Мы при тестах получили максимальную скорость 1250 оборотов в минуту при 1/4 шага.
При разработке схемы был проверен режим работы полевых транзисторов с использованием драйверов (1.2 А) на «раскачку» затворов, температурный режим практически не изменился (разница около 10 градусов), пришли к выводу что основной нагрев приходится на защитные диоды полевых транзисторов, исходя из этого управление оставили напрямую с логики. На осциллографе (С1-117) фронт нарастания и спада выглядел очень достойно.
Печатная плата контроллера разведена в двухстороннем варианте под «ЛУТ». Силовые транзисторы T1 - T4 и стабилизатор VR1 монтируются на плату с нижней стороны печатной платы (пластиком к плате) для удобства крепления радиатора (как на фото). Изоляция транзисторов и стабилизатора через теплопроводящие прокладки от радиатора ОБЯЗАТЕЛЬНА!!! Транзисторы не менее чем с двойным запасом по подаваемому напряжению на силовую часть.

НАСТРОЙКА
- Установить подстроечные резисторы R2 и R4 в одинаковое положение, рассчитав нужное сопротивление исходя из требуемого тока фазы: Rп = 56000 / ( 3,57 / ( 0,27 * I ) – 1 )). Формула под конкретные номиналы указанные в схеме!!!
- При наличии осциллографа проконтролировать формы сигналов как приведено ниже на 1/4 шага при частоте STEP 2 Кгц (значение частоты не критично, просто наши осциллограммы при вышеуказанных параметрах):
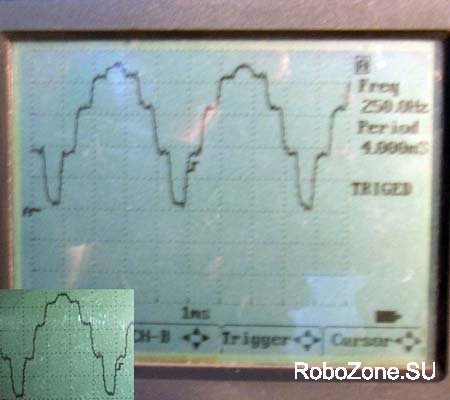
Опорное напряжение для микрошага, контролируется на С1 и С2
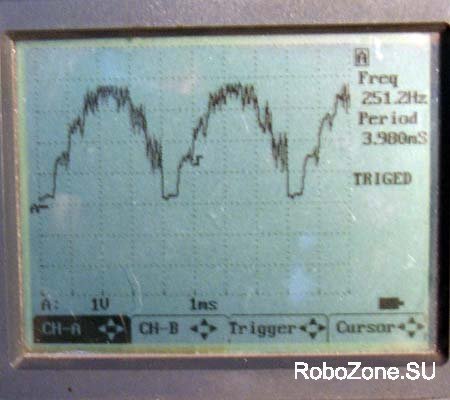
Форма напряжение на выходе LM358 промодулированое ШИМом
Видео-ролик разгона шагового двигателя PL57H76-3.0-6 в режиме 1/4 шага, напряжение питания силовой части 24 вольта, ток 0,8 ампер на фазу. Генерация импульсов STEP подавалась с тестового макета автономного контроллера управления станком ЧПУ. Максимальные полученные обороты составили около 1000 об/мин., с учетом некондиционного двигателя (отсутствие осевой центоровки) и скачкообразным повышением частоты (имитация работы K-CAM).
Схема контроллера в формате sPlan 6.0, разводка печатной платы под ЛУТ в формате Sprint-Layout 5.0 и файл прошивки в формате *.hex вы можете скачать ниже:
Плата в одностороннем варианте с перемычками (не тестировалась):
Вместо PIC18F2320 можно использовать PIC18F2220, но в интернет магазинах они дороже..., кому очень надо пишите в личку, прошивку в *.hex под него вышлю.
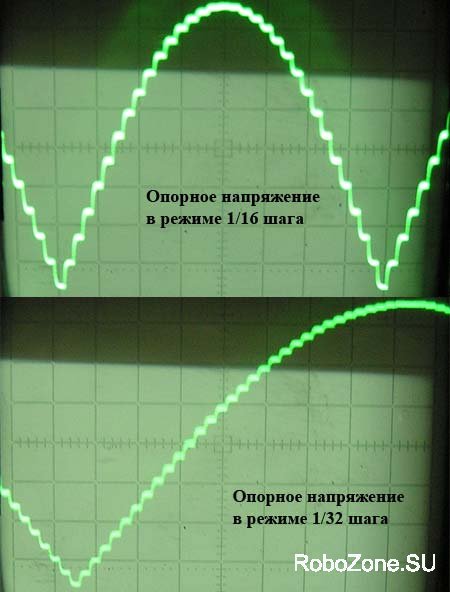
Опорное напряжение на С1 и С2 в режиме 1/16 и 1/32 шага
P.S. Данная информация предоставлена не для коммерческого использования.
Вернуться назад