PWM контроллер шпинделя (Rev 1.1)
12 января 2010. Разместил: Sergey_r
Основные особенности PWM контроллера шпинделя:
- простая безтрансформаторная схема
- питание от частотного преобразователя
- малый ток потребления (6 мА)
- полный диапазон регулировки (0 – 10 вольт)
- широкий диапазон входной частоты ШИМ (2 – 450 Гц)
- 256 шагов регулирования в бесплатной версии и 1024 в коммерческой версии
")
Данная схема разрабатывалась для совместного использования с платой опторазвязки V2.2.
Ниже преведены необходимые настройки Mach 3 для использования возможности программного задания скорости шпинделя:
Заходим в настройки поротов и пинов: Config – Ports and Pins, и выбираем закладку Motor Outputs. В данном окне определяем ножку вывода для шага шпинделя: в строке Spindle активируем пункт Enabled и выставляем 1 в пункте Step Pin (т.к. именно этот вывод LPT порта отведен для регулировки PWM на нашей плате опторазвязки) и 1 или 2 (в зависимости от выбранного порта управления на первой закладке данного меню настроек) в пункте Step Port. Далее переходим на закладку Spindle Setup и в окне Motor Control отмечаем пункты Use Spindle Motor Output и PWM Control, значение PWM Base Frec. лучше выставить в диапазоне 5 – 50. Далее заходим в меню настроек скорости шпинделя (об/мин): Config – Spindle Pulleys и выставляем минимальную и максимальную скорость вашего шпинделя, Min Speed и Max Speed соответственно.
Чем выше выбранная вами частота, тем меньше выбор скоростей и больше нагрузка на само ядро Mach. Число разных скоростей это Kernel Speed/PWMBase Freq. Так например если вы работаете на 35000 Гц и задали PWMBase = 50 Гц, то доступно 700 разных скоростей. Этого вполне достаточно для любой реальной системы, так как двигатель с максимальной скоростью 25000 оборотов в минуту может, теоретически, управляться с шагом меньше чем 36 оборотов в минуту. На самом деле это число будет еще меньше, т.к. минимальная скорость шпинделя всегда выше ноля. Так к примеру у относительно недорогих и распространенных китайских шпинделей минимальная и максимальная скорости составляют 8000 – 25000 об/мин соответственно, в итоге шаг перестройки получится менее 25 об/мин.
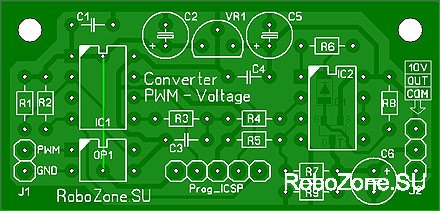
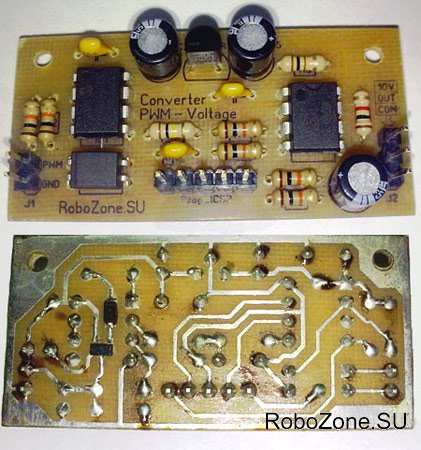
Печатная плата разведена в одностороннем варианте под ЛУТ. При повторении следует учитывать, что транзистор T1 и диод D1 имеют SMD корпуса и расположены со стороны пайки. Такое решение вызвано тем, что выбор p-канального полевого транзистора в корпусе TO-92 весьма ограничен, а в корпусе SOT-23 выбор довольно большой. Так же следует учитывать, что если впаивается уже запрограммированный PIC контроллер, то разъем «Prog_ICSP» распаивать нет необходимости.
В настройке данное устройство не нуждается, но для достижения более точной регулировки желательно подобрать сопротивления R5 и R7, они должны иметь друг с другом как можно меньший разброс.
Схему контроллера в формате sPlan 6, разводку печатной платы под ЛУТ в формате Sprint-Layout 5 и файл прошивки в формате *.hex вы можете скачать ниже:
Так как производства больше не будет - пользуйтесь бесплатно 
Вернуться назад