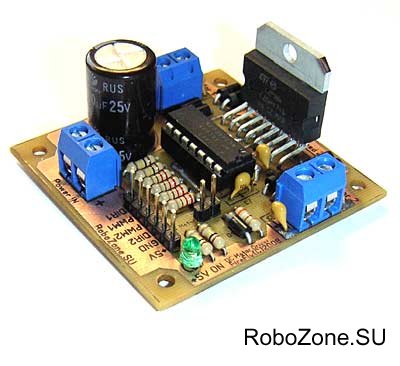
Микросхема L298N давно пользуется большой популярностью у зарубежных любителей робостроения, так как при небольших габаритах и простом управлении позволяет управлять двумя электродвигателями постоянного тока с максимальной нагрузкой до 2А на каждый канал (при параллельном включении каналов – одним двигателем с максимальной нагрузкой до 4А).
В нашей стране до недавнего времени было довольно проблематично приобрести данную микросхему. Сейчас подобной проблемы нет, и L298N становится актуальным решением для любительской робототехники.

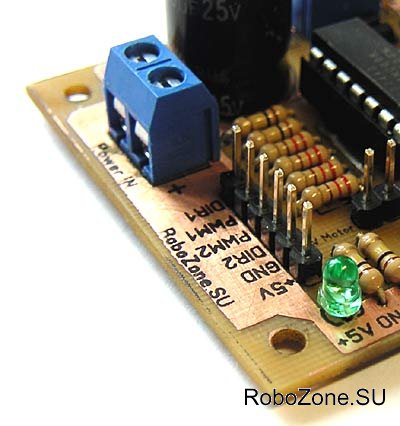
Как говорилось ранее, управление двигателями на основе L298N очень простое - направление вращения электродвигателей задается изменением логических уровней на входах каждого из каналов, что требует для управления двумя двигателями четырех выводов порта микроконтроллера и дополнительно еще двух для подачи ШИМ на каждый канал ENABLE (если вы не используете ШИМ, то достаточно подать на данные выводы питание либо высокий лог. уровень с МК ) Мы решили немного изменить схему управления. В представленной схеме полное управление двигателями осуществляется вместо шести выводов контроллера – четырьмя.
Это стало возможно при использовании микросхемы стандартной логики 74HC00. В нашей схеме изменение направления вращения каждого из двигателей осуществляется путем изменения логических уровней на DIR1 и DIR2. По умолчанию на этих входах установлен низкий лог. уровень. Достаточно изменить его на высокий лог. уровень и двигатели будут крутиться в другую сторону. ШИМ подается соответственно на PWM1 и PWM2.
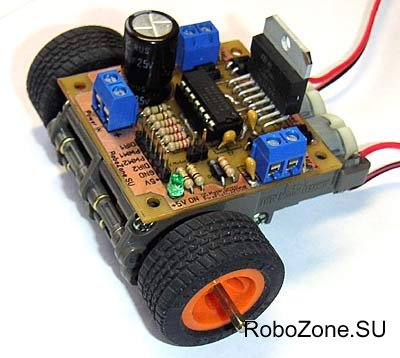
Как и L293x, L298N обладает теми же недостатками – повышенное тепловыделение и энергопотребление. В связи с этим, при использовании модуля на предельных нагрузках на корпус L298N необходимо установить радиатор. Его установка не вызовет особых проблем, так как L298N выполнена в корпусе типа MULTIWATT, который имеет специальное отверстие для крепления радиатора. Данный модуль был протестирован в различных режимах и показал стабильную работу.