Драйвер управления двумя коллекторными двигателями до 1А (L293x)
Серия микросхем L293, не смотря на свои недостатки, пользуется большой популярностью в любительском роботостроении. Особенно она популярна у начинающих. Драйверы управления коллекторными двигателями на основе L293 просты как при подключении, так и в управлении. Так же микросхемы широко распространены и приемлемы по цене.
В серии присутствует две основных модификации – с индексом “D” и без оного. Буква “D” в названии говорит о том, что данная микросхема имеет встроенные защитные диоды на выходе – L293D. Соответственно остальные (L293N, L293E и т.д.) встроенных диодов не имеют. Для всех микросхем без индекса “D” установка защитных диодов на выходах является обязательным условием подключения, в противном случае микросхема долго не прослужит. Другим немаловажным различием в модификациях является максимальный рабочий ток. Микросхема с индексом “D” может продолжительно работать с нагрузкой до 600mA на каждый канал, а все остальные до 1А на канал. При необходимости можно повысить нагрузочную способность вдвое – соединить параллельно оба канала микросхемы и подключить к одному двигателю.
Теперь о недостатках микросхем серии L293x. Микросхемы не отличаются маленьким потреблением, сильно греются и на них имеет место быть падение напряжения (до 1,5-1,7 вольт), что необходимо учитывать при подаче питания на двигатели. Все эти недостатки происходят из особенностей выходных каскадов серии L293 – они выполнены на обычных транзисторах.
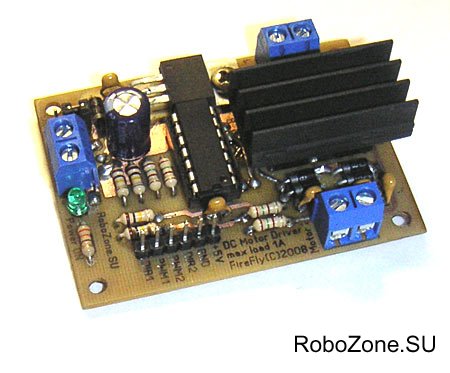
Мы давно и успешно используем данную серию микросхем в своих конструкциях. Одну из них хотим предоставить вашему вниманию.
Обычное включение микросхем серии L293x очень простое – достаточно подключить питание логики, питание двигателей и выводы управления подключить к микроконтроллеру (для L293N(E) – добавить внешние защитные диоды). Направление вращения задается изменением логических уровней на входах каждого из каналов, что требует для управления двумя двигателями четырех выводов порта микроконтроллера и дополнительно еще двух для подачи ШИМ на каждый канал EN (если вы не используете ШИМ, то достаточно подать на данные выводы питание либо высокий лог. уровень с МК ) Мы решили немного изменить схему управления. В представленной схеме полное управление двигателями осуществляется вместо шести выводов контроллера – четырьмя.

Это стало возможно при использовании микросхемы стандартной логики 74HC00. В нашей схеме изменение направления вращения каждого из двигателей осуществляется путем изменения логических уровней на DIR1 и DIR2. По умолчанию на этих входах установлен низкий лог. уровень. Достаточно изменить его на высокий лог. уровень и двигатели будут крутиться в другую сторону. ШИМ подается соответственно на PWM1 и PWM2.
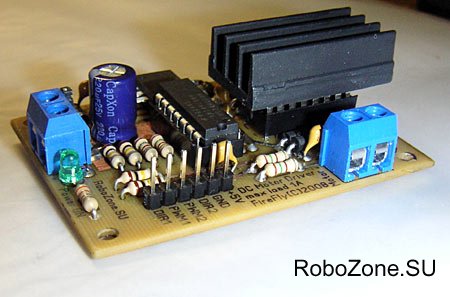
Дополнительно в схему включен линейный стабилизатор напряжения LM2940. Его задачей является дополнительная подпитка общей схемы при отсутствии в конструкции своего стабилизатора. Подача питания на двигатели может осуществляться как из общей шины питания вашей конструкции, так и из дополнительного источника – переключается перемычкой.
Драйвер так же может быть использован при постройке простого робота без использования микроконтроллера для соревнований следование по линии. (См. Сенсор линии на основе LM311 ).
В схеме может быть установлена любая микросхема из серии L293x, в исполнении DIP-16. При использовании L293D распаивать внешние защитные диоды не надо.
Так как микросхемы L293x довольно сильно нагреваются в процессе работы, настоятельно рекомендуется установка радиатора. Мы используем старые радиаторы от различных плат ПК – отпиливаем необходимого размера. Самая простая установка радиатора осуществляется следующим путем – тонким слоем покрываем сверху корпус микросхемы термопастой, за исключением 1-2 мм корпуса по краям, затем аккуратно на свободные от термопасты участки наносим немного супер-клея и устанавливаем радиатор. Старайтесь установить радиатор сразу ровно, так как супер-клей схватывает очень прочно и что-либо потом исправить будет проблематично. С установленным радиатором за работоспособность микросхемы на предельных нагрузках уже можно не беспокоится  .
.
.
В целях уменьшения габаритов драйвера была разведена двухсторонняя печатная плата. Сложность изготовления повысилась но мы постарались сделать как можно более широкие токопроводящие дорожки. Технология изготовления платы не отличается от стандартного ЛУТа, за исключением необходимости точного сведения сторон. Переходы между сторонами платы выполнены с помощью кусочков проводника, запаянных с обоих сторон (либо выводных элементов).
Плата была досконально протестирована в работе как с питанием двигателей от общей шины, так и с дополнительным источником – проблем не выявлено.
Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 4.0 под ЛУТ вы можете скачать ниже.
