Как говорится «по заявкам телезрителей» =)
В наших планах была основная контроллерная плата под 40-ногие микроконтроллеры AVR – ATmega16, ATmega32, ATmega644, но планировалась она гораздо позднее, так как MRC28 на данный момент нам вполне хватает. В связи с участившимися просьбами развести плату контроллера под «сороконожки» было решено удовлетворить данное желание общественности =). Итак…
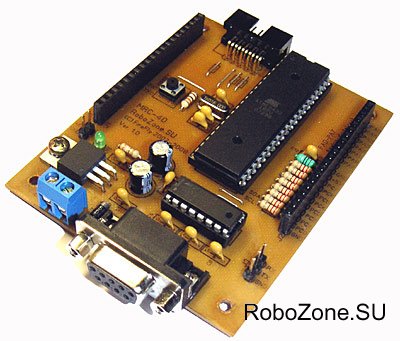
Форм-фактор и общая концепция полностью повторяет наш предыдущий робоконтроллер MRC-28, а именно:
- Габариты платы полностью идентичны MRC28.
- Соединение с ПК реализовано на MAX232CPE.
- Встроенный источник стабилизированного питания основан на L7805.
- Концепция разъемов, в основном, так же сохранена.
-
Обвязка микроконтроллера аналогична.
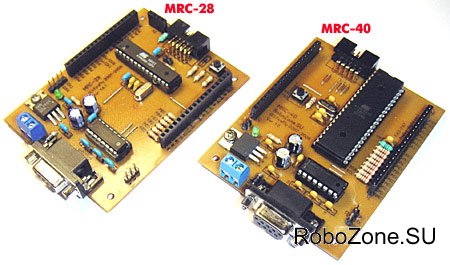
Что изменилось по сравнению с MRC28
- Добавился еще один порт
- На 2 пина увеличены каждый из основных разъемов портов.
- Уменьшилось количество выводов дополнительного питания (что собственно не критично)
- Изменилось расположение разъема внутрисхемного программирования и кнопки сброса
-
Убран дополнительный разъем UART (на основном разъеме J1 он присутствует)
")
")
")
")
Робоконтроллер прошел тестирование и показал 100% работоспособность.
Плата разведена в одностороннем варианте с небольшим количеством перемычек. Изначально мы хотели развести двухстороннюю плату, но потом отказались в силу большей трудоемкости и сложности для начинающих. Возможно, в будущем еще будет двухсторонний вариант.
Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 4.0 под вы можете скачать ниже.
