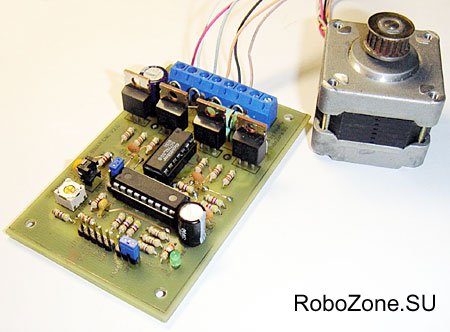
Представляем краткое описание, схему и печатную плату контроллера униполярного шагового двигателя на основе микроконтроллера PIC16F628A. Этот контроллер представляет собой улучшенную версию предыдущего - http://robozone.su/2008/06/21/stepdir-kontroller-unipoljarnogo.html . Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. Автор схемы и прошивки данного контроллера является Регнер Сергей, представитель фирмы «Бинар» (г. Камышин). Печатная плата контроллера была разработана нами.
Данный контроллер разрабатывался специально для любительских станков ЧПУ (CNC) и в данный момент установлен в замен предыдущей версии на станке для сверления печатных плат.
Особенности контроллера униполярного двигателя PIC BINAR CNC 2.0:
- Аппаратная ШИМ регулировка ограничения тока фаз
- Аппаратная ШИМ регулировка ограничения тока фаз в режиме удержания
- Больший диапазон тока фаз (зависит от силовой части контроллера)
- Использование универсальных управляющих сигналов STEP, DIR, ENABLE.
- Работа в режимах «полный шаг», «полушаг» (FULL STEP/ HALF STEP)
- Рекомендуемое максимальное рабочее напряжение двигателя до 35В

Модифицированная схема и прошивка контроллера позволяют (с соответствующими транзисторами) более качественно и эффективно управлять мощными униполярными шаговыми двигателями чем предыдущая версия контроллера. В данном варианте используется аппаратная генерация ШИМ что позволило увеличить частоту и улучшить стабильность работы. Коммутация обмоток двигателя осуществляется с помощью микросхемы стандартной логики 74LS08.
Ограничение тока фаз осуществляется с помощью подстроечного резистора R13.
Регулировка ограничения тока в режиме удержания осуществляется подстроечным резистором R11 и настраивается относительно рабочего тока. Программа контроллера переходит в режим «удержание» автоматически при отсутствии сигнала STEP – это снижает потребление энергии и уменьшает нагрев двигателя.
Сигнал ENABLE управляется низким логическим уровнем. Включение и отключение режима работы сигнала ENABLE осуществляется перемычкой.
Так же перемычкой переключаются режимы работы «шаг» и «полушаг», при изменении режимов работы необходим перезапуск контроллера.
Силовые MOSFET транзисторы могут быть выбраны под конкретные требования с подходящей цоколевкой (если устанавливаются более мощные транзисторы и планируется использование двигателей с большим током фаз, необходима установка более мощных резисторов R25, R26). Рекомендуются к использованию IRLZ44 либо подобные серии с управлением логическими уровнями.
Резисторы R25 и R26 в нашем варианте имеют максимальную мощность 3W.
В улучшенном варианте контроллер тестировался с различными униполярными двигателями от списанной орг.техники и показал стабильную работу и минимальный нагрев. Самый мощный двигатель имел сопротивление фазы 5 Ом. Нагрев двигателя был в пределах рабочего режима, нагрев контроллера самый минимальный (подаваемое напряжение 12В). Тестировался контроллер совместно с нашей платой LPT интерфейса и под управлением программы K-cam.
Печатная плата контроллера разведена в двухстороннем варианте, что позволило немного уменьшить габариты платы. Несмотря на это повторение не составит особого труда.
Данная информация поставляется «как есть» - претензии не принимаются ;)
В связи с выходом данной версии контроллера, предыдущая версия не рекомендуется для повторения если вы планируете использовать мощные двигатели (с сопротивлением тока фазы менее 10 Ом).
ВНИМАНИЕ! Все вопросы по поводу данного контроллера прошу задавать разработчику через систему личных сообщений сайта - Sergey_r
Схема контроллера в формате sPlan 6.0, разводка печатной платы под ЛУТ в формате Sprint-Layout 4.0 и файл прошивки в формате *.hex вы можете скачать ниже.
Выкладываем печатную плату под SMD элементы, разработанную пользователем Tolik_Odessa
Разводка печатной платы под ЛУТ в формате Sprint-Layout 5.0
скачать SMD вариант
ВНИМАНИЕ! Данный вариант нами не проверялся, по всем вопросам обращаться к автору печатной платы.
Тема закрыта для комментариев
По всем вопросам обращаться через службу личных сообщений
