Микрошаговый контроллер биполярного шагового двигателя V5.1
10 февраля 2010. Разместил: Sergey_r
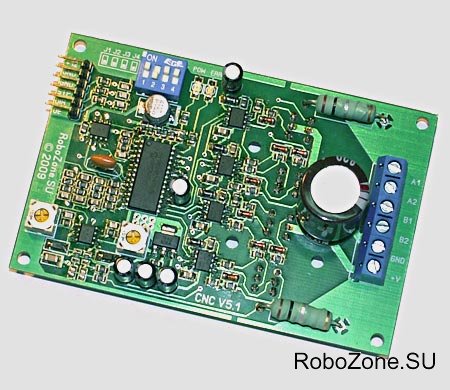
Контроллер биполярного шагового двигателя на основе микроконтроллера PIC18F2320. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. В контроллере реализован микрошаговый режим и режим удержания с понижением тока фаз. Данный модуль является улучшенной версией микрошагового контроллера биполярного двигателя версии 5.0, в частности, при самостоятельной сборке, более "безопасен" в настройке.
Особенности контроллера 5.1:
1. Аппаратная ШИМ регулировка ограничения тока фаз
2. Режим удержания с понижением тока фаз при отсутствии сигнала STEP более 2-х секунд
3. Большой диапазон напряжения и тока фаз
4. Использование универсальных управляющих сигналов STEP, DIR, ENABLE
5. Работа в режимах «полный шаг», «полушаг» и «микрошаг»
6. Частота сигнала STEP до 100 khz.

Регулировка тока фаз осуществляется с помощью резисторов R35 и R49. При указанных номиналах на схеме возможно установить максимальный ток до 6,5 ампер.
Перемычками J1-J3 на плате переключаются режимы работы «шаг», «полушаг» и «микрошаг»:
Режимы работы J1 J2 J3
1 off off off
1/2 on off off
1/4 off on off
Только в коммерческой версии прошивки:
1/5 on on off
1/8 off off on
1/10 on off on
1/16 off on on
1/32 on on on
Режим удержания с понижением тока фаз будет работать при установленной перемычке J4. Ток удержания зависит от номиналов R16 и R22, с уменьшением их номиналов уменьшится и ток удержания. Любое изменение в конфигурации перемычек, требует перезапуск контроллера.
Печатная плата контроллера разведена в двухстороннем варианте под «ЛУТ».
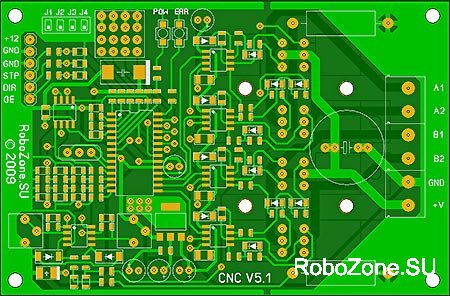
При наведении курсора на элемент - отображается его номинал, поэтому нумерация элементов не приведена, в архиве для скачки присутствует "карта" расположения элементов для удобства самостоятельного изготовления контроллера. Силовые транзисторы T1 – T8 монтируются на плату с нижней стороны печатной платы (пластиком к плате) для удобства крепления радиатора как на фото ниже.
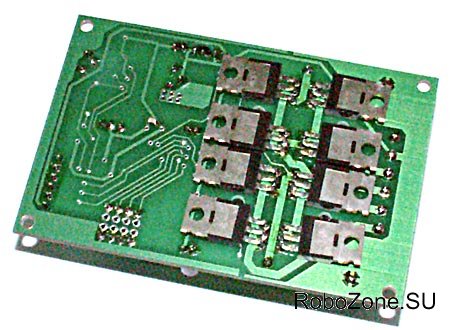
Изоляция транзисторов через теплопроводящие прокладки от радиатора ОБЯЗАТЕЛЬНА!!!
Так как производства больше не будет - пользуйтесь бесплатно 
Вернуться назад