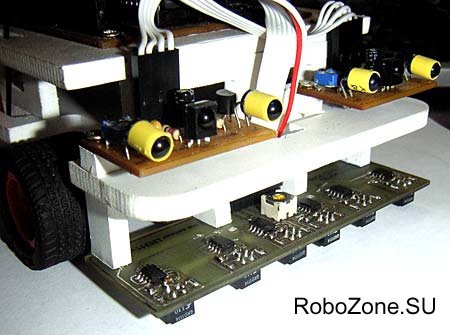
Данный сенсор предназначен для использования в спортивных роботах, выступающих в дисциплинах – «следование по линии», «робосумо», «кегельринг». Так же плату сенсора можно применить в других проектах, которые требуют определение наличия линии (определения поверхности по типу – светлое/темное).
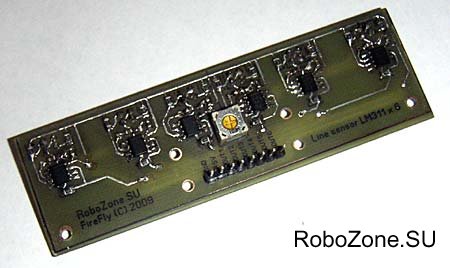
Основными элементами схемы сенсора являются оптические рефлективные (на отражение) датчики QRD1114 и компараторы LM311. Оптические датчики работают в инфракрасном диапазоне.
Схема проста и состоит из шести датчиков, шести компараторов и небольшого количества обвязки. Один канал схемы является, по сути, облегченным вариантом одиночного датчика – «Модуль датчика линии на основе компаратора LM311». Соответственно принцип действия и особенности работы полностью идентичны.

В отличие от «родительской» версии схемы сенсора, в данном варианте отсутствуют сигнальные светодиоды, а так же настройка опорного напряжения компараторов (чувствительность) осуществляется одним подстроечным резистором на все каналы одновременно. Все каналы схемы полностью идентичны.
Датчик QRD1114 представляет собой «спарку» из инфракрасного светодиода и фототранзистора. В связи с этим в схеме можно использовать не только их, но и любые другие подобные датчики либо отдельные светодиоды и фототранзисторы, к примеру, из старых оптических «мышей» либо любых других малогабаритных.
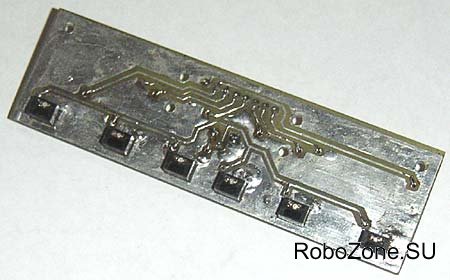
Печатная плата двусторонняя, выполнена в SMD варианте. Габариты платы позволяют ее установку на роботов типа «минисумо» т.е. она меньше 10 см. в длину.

Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 5.0 под ЛУТ вы можете скачать ниже.
Обсуждение платы прошу проводить на форуме.
