 Ранее мы опубликовывали схему экспериментального сдвоенного сенсора на базе аудио усилителей LM386 и компаратора. Схема была вполне работоспособная и мы провели с ней много интересных экспериментов. В данный момент было решено начать использовать обработку звука непосредственно на роботах. Для этого и был разработан данный модуль.
Ранее мы опубликовывали схему экспериментального сдвоенного сенсора на базе аудио усилителей LM386 и компаратора. Схема была вполне работоспособная и мы провели с ней много интересных экспериментов. В данный момент было решено начать использовать обработку звука непосредственно на роботах. Для этого и был разработан данный модуль.
Информация к новости
8 июля 2008
- Просмотров: 63610
- Автор: administrator
- Дата: 8 июля 2008
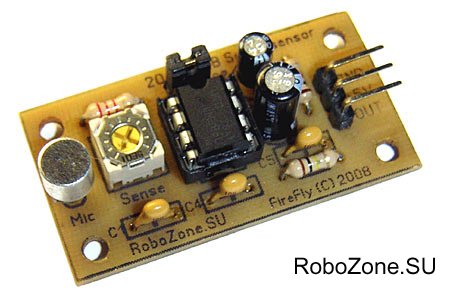
Звуковой сенсор на основе аудио усилителя LM386
Категория: Контроллер MRC40
Ранее мы опубликовывали схему экспериментального сдвоенного сенсора на базе аудио усилителей LM386 и компаратора. Схема была вполне работоспособная и мы провели с ней много интересных экспериментов. В данный момент было решено начать использовать обработку звука непосредственно на роботах. Для этого и был разработан данный модуль.
Информация к новости
31 мая 2008
- Просмотров: 52441
- Автор: administrator
- Дата: 31 мая 2008
Сдвоенный звуковой сенсор на базе LM386 и LM393
Категория: Эксперименты
 К примеру – самодельный робот уже умеет уверенно обходить препятствия, двигаться на свет (или от света), находить зарядное устройство и выполнять прочие интересные действия. Осталось добавить ему возможность обработки звуковых сигналов. По какому именно алгоритму робот будет реагировать на звуковое окружение рассказывать не будем, а заострим внимание на технической части – робототехнических «ушах» или звуковых сенсорах.
К примеру – самодельный робот уже умеет уверенно обходить препятствия, двигаться на свет (или от света), находить зарядное устройство и выполнять прочие интересные действия. Осталось добавить ему возможность обработки звуковых сигналов. По какому именно алгоритму робот будет реагировать на звуковое окружение рассказывать не будем, а заострим внимание на технической части – робототехнических «ушах» или звуковых сенсорах.
В данном материале представляем экспериментальный модуль сдвоенного звукового сенсора на основе двух аудио усилителей LM386 и сдвоенного компаратора LM393. Мы уже достаточно давно пытались сделать подобную схему на различных компонентах, но ранее полученные результаты нас не удовлетворяли. Эта наш последний и самый удачный вариант.
Информация к новости
22 апреля 2008
- Просмотров: 43010
- Автор: administrator
- Дата: 22 апреля 2008
Модуль аппаратного генератора для инфракрасных датчиков TSOP
Категория: Контроллер MRC28
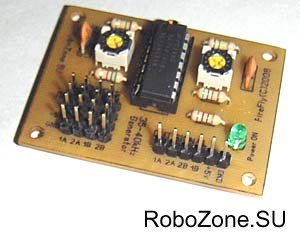 Многие начинающие сталкиваются с проблемой генерации правильной частоты для использования в качестве бесконтактных датчиков препятствия инфракрасных фотоприемников типа TSOP. Данную проблему можно решить с помощью аппаратных средств генерации. В данном материале представлена описание, схема и печатная плата модуля аппаратной генерации меандра.
Многие начинающие сталкиваются с проблемой генерации правильной частоты для использования в качестве бесконтактных датчиков препятствия инфракрасных фотоприемников типа TSOP. Данную проблему можно решить с помощью аппаратных средств генерации. В данном материале представлена описание, схема и печатная плата модуля аппаратной генерации меандра.
Информация к новости
9 апреля 2008
- Просмотров: 100671
- Автор: administrator
- Дата: 9 апреля 2008
Модуль ИК-датчика на основе TSOP2136
Категория: Контроллер MRC28
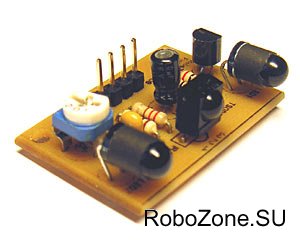 Инфракрасные приемники серий TSOP (17xx, 21xx) давно и достаточно успешно используются в любительской робототехнике. Применяются они как по своему прямому назначению (для приема команд по ИК-каналу) так и в качестве недорогих бесконтактных датчиков препятствия. Их преимущество по сравнению с обычными инфракрасными фототранзисторами и фотодиодами – лучшая помехозащищенность, так как TSOPы реагируют только на сигнал с определенной частотой и скважностью. Частота принимаемого сигнала обозначена в маркировке ИК-приемников – последние две цифры.
Инфракрасные приемники серий TSOP (17xx, 21xx) давно и достаточно успешно используются в любительской робототехнике. Применяются они как по своему прямому назначению (для приема команд по ИК-каналу) так и в качестве недорогих бесконтактных датчиков препятствия. Их преимущество по сравнению с обычными инфракрасными фототранзисторами и фотодиодами – лучшая помехозащищенность, так как TSOPы реагируют только на сигнал с определенной частотой и скважностью. Частота принимаемого сигнала обозначена в маркировке ИК-приемников – последние две цифры.
Несомненными преимуществами так же являются простота подключения и доступность в приобретении.