Управление большим количеством сервоприводов может быть довольно проблематичным. По нашему мнению в данном плане изобретательство «велосипедов» не стоит времени и трудов. В связи с этим мы использовали часть схемы и программное обеспечение из открытого проекта сервоконтроллера SSC-32 для создания данного модуля.
Почему именно SSC-32?
Все очень просто:
- Проект открытый и полностью отлаженный, а так же постоянно развивается.
- SSC-32 пользуется большой популярностью
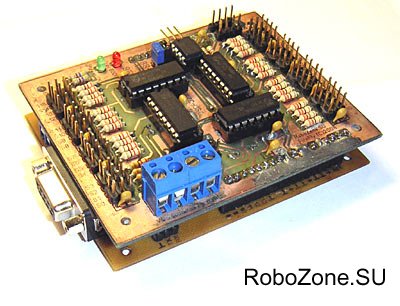
- Позволяет использовать наш робоконтроллер MRC28 без каких либо существенных переделок (снимаем модуль сервоконтроллера и используем MRC28 в любых других проектах)
- SSC-32 может использоваться в Microsoft Robotics Developer Studio 2008
- SSC-32 поддерживается бесплатной системой робототехнического зрения RoboRealm.
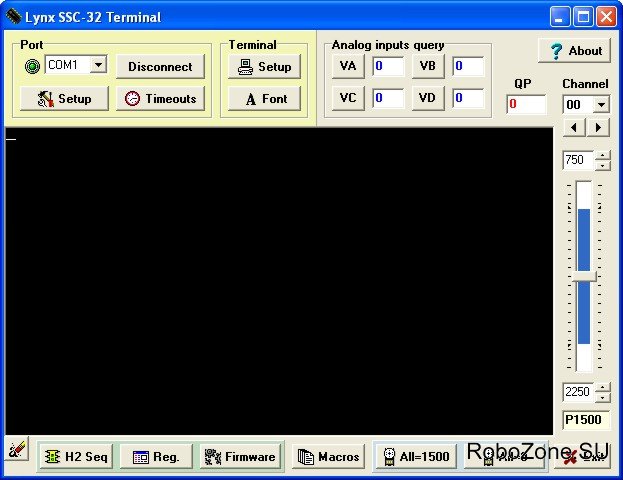
- Так же Lynxmotion предоставляет бесплатную утилиту Lynx SSC-32 Terminal, которая позволяет легко протестировать работоспособность модуля, откалибровать сервоприводы, сменить прошивку и еще несколько полезных функций.
Собственно что же представляет собой сервоконтроллер SSC-32?
SSC-32 недорогой сервоконтроллер, но несмотря на это он обладает большими возможностями . Он имеет высокое разрешение (1uS) для точного позиционирования сервоприводов, и обеспечивает их плавный ход. Диапазон вращения каждого сервопривода обеспечивается от 0.50 mS к 2.50 mS по кругу в пределах 180 °. Контроллер обеспечивает регулирование скорости и угла поворота, а так же их сочетание. SSC-32 дополнительно обладает функцией микширования сигналов для обеспечения управления группами серв в различных комбинациях. Это очень мощная функция для создания комплексов шагающих роботов различных конфигураций. Сервоконтроллер так же имеет 4 цифро-аналоговых входа (ABCD), которые могут использоваться для дополнительных задач. Сервоконтроллер позволяет вручную выбрать скорость обмена по UART посредством двух перемычек на плате.
")
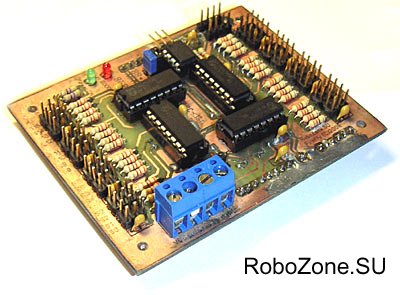
Схема модуля представляет собой незначительно измененную часть оригинального сервоконтроллера. Модуль содержит четыре сдвиговых регистра 74HC595N, микросхему внешней i2C EEPROM памяти 24LC256, соединительные разъемы и набор резисторов. Остальная часть оригинального SSC-32 уже имеется в составе схемы робоконтроллера MRC-28.
Тестирование данного модуля осуществлялось с помощью бесплатной утилиты Lynx SSC-32 Terminal и системы робототехнического зрения RoboRealm. Работоспособность прекрасная.
Печатная плата модуля разведена в двухстороннем варианте. При должной аккуратности повторяемость вполне удовлетворительная. Исходники, прошивку, программы и документацию вы можете скачать с сайта разработчика.
http://www.lynxmotion.com/images/html/proj078.htm
http://www.lynxmotion.com/Product.aspx?productID=567&CategoryID=15#downloads
